Towards breath sensors that are self-powered by design
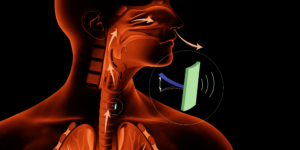
Bio-sensors implanted in the body are revolutionizing healthcare. How to power these sensors is an open challenge. One promising option is to harvest small amounts of energy from the body itself, effectively making the sensor self-powered. We derived and tested a model for a self-powered sensing in a human airway, where measuring subtle changes in breathing could, e.g., trigger early interventions for patients with severe asthma.